世界の海洋水中ロボット市場:車両タイプ別(自律型無人潜水機、ハイブリッド水中ビークル、遠隔操作無人潜水機)、深度別(深海、浅海、超深海)、コンポーネント別、推進方式別、用途別、エンドユーザー別-世界市場予測2025-2032年

※本ページの内容は、英文レポートの概要および目次を日本語に自動翻訳したものです。最終レポートの内容と異なる場合があります。英文レポートの詳細および購入方法につきましては、お問い合わせください。
*** 本調査レポートに関するお問い合わせ ***
## 海洋水中ロボット市場:詳細分析(2025-2032年)
### 市場概要
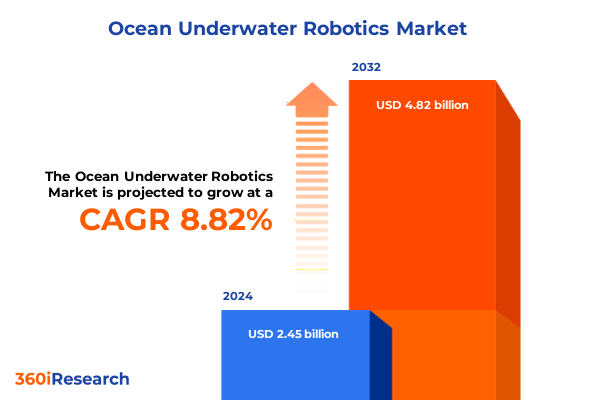
海洋水中ロボット市場は、2024年に24.5億米ドルと推定され、2025年には26.7億米ドルに達すると予測されています。その後、2032年までに複合年間成長率(CAGR)8.82%で48.2億米ドル規模に成長すると見込まれており、ニッチな技術的関心事から海底作業の基盤へと急速に移行しています。先進材料、洗練されたセンサーシステム、自律制御アルゴリズムの融合により、次世代プラットフォームが実現し、困難な海洋環境におけるミッション遂行能力を拡大し、人間の介入を最小限に抑えることが可能になりました。これにより、海洋探査、検査、保守作業の実施方法が再構築され、前例のない信頼性と精度が提供されています。
持続可能な資源管理、環境モニタリング、セキュリティに対する世界的な需要が高まる中、海洋水中ロボットは、オフショアエネルギー生産者から科学研究機関に至るまで、幅広いステークホルダーにとって不可欠なツールとして浮上しています。この背景のもと、市場は業界横断的なコラボレーション、戦略的投資、イノベーションを促進するための規制枠組みの急増を経験しています。概念的なプロトタイプから実用的な車両へとシームレスに移行する今日の海洋水中ロボットソリューションは、数十年にわたる研究と厳格なエンジニアリングの成果を具現化しています。この市場は、自律型水中ビークル(AUV)、ハイブリッド型水中ビークル(HUV)、遠隔操作型水中ビークル(ROV)といった多様な車両タイプ、深海、浅海、超深海といった深度範囲、通信、画像処理、ナビゲーション、推進、マニピュレーターなどのコンポーネント、浮力駆動、プロペラ駆動、ポンプジェットなどの推進タイプ、防衛・セキュリティ、環境モニタリング、検査・保守、研究・探査、測量・マッピングなどのアプリケーション、そして石油・ガス、養殖、環境保護機関、軍事・防衛、学術・商業研究機関などのエンドユーザーによって細分化されています。
### 推進要因
海洋水中ロボット市場の成長は、主に以下の要因によって推進されています。
**1. 革新的な技術進歩:**
水中ロボットの分野は、自律性、エネルギー効率、データ分析におけるブレークスルーによって変革期を迎えています。現代のプラットフォームは、表面からの介入なしにリアルタイムの意思決定と適応的なミッション計画を可能にする高度な人工知能(AI)を搭載しています。このレベルの自律性は、運用コストを削減し、展開耐久性を延長し、これまでアクセスできなかった海洋環境での新たなミッションプロファイルを可能にします。同時に、モジュール式アーキテクチャの統合により、カスタマイズのペースが加速し、エンドユーザーは特定の運用要件に対応するセンサーペイロード、推進システム、通信モジュールを構成できるようになりました。このモジュール性は、迅速なプロトタイピングを促進し、開発サイクルを短縮し、総所有コストを削減することで、高度な海底機能へのアクセスを民主化しています。さらに、大容量エネルギー貯蔵とワイヤレス充電ソリューションの登場は、長期間ミッションにおける最も永続的な障壁の一つを軽減しています。これらの電力革新は、計算流体力学によって最適化された流体力学的船体設計と相まって、音響および流体力学的シグネチャを最小限に抑えながら運用範囲を拡大しています。これらの破壊的技術は、集合的にパフォーマンスベンチマークを再定義し、水中ロボットフリートのスケーラブルな展開の可能性を再定義しています。
**2. 多様なアプリケーションとエンドユーザーの需要:**
市場は、防衛・セキュリティ、環境モニタリング、検査・保守、研究・探査、測量・マッピングといった幅広いアプリケーションによって細分化されています。特に、インフラストラクチャやパイプラインの完全性に関する検査・保守作業では、高圧条件下で動作可能な特殊なセンサーやマニピュレーターが求められます。同様に、深海科学研究や水路測量ミッションでは、精密なナビゲーションと高精細な画像処理が必要とされ、多用途な車両構成の必要性が強調されています。エンドユーザーは、オフショア生産およびパイプライン保守部門を含む従来の石油・ガス事業者から、養殖企業、環境保護機関、軍事・防衛組織、学術・商業研究機関まで多岐にわたります。これらの多様なニーズが、特定のミッションパラメータに合わせた車両の採用を促進しています。
**3. 地域ごとの市場動向と成長要因:**
* **アメリカ大陸:** オフショアエネルギー事業、沿岸インフラ検査、極地および温帯地域における科学研究プログラムの活発化により、強い需要が見られます。北米の防衛イニシアチブは、機雷対策ミッション用の自律型プラットフォームへの投資をさらに促進しており、ラテンアメリカの環境機関は生息地モニタリングと生物多様性研究のために遠隔操作型水中ビークルを活用しています。
* **EMEA(ヨーロッパ、中東、アフリカ):** 厳格な環境規制と積極的な海上安全指令が、商業用および軍用海底車両における高度なセンサー統合を促進しています。中東のオフショア石油・ガス部門は、複雑な保守作業のためにハイブリッド型水中ビークルを採用しており、ヨーロッパの研究コンソーシアムは、海洋データ収集のための相互運用可能なグライダーネットワークの共同開発を先導しています。
* **アジア太平洋地域:** 急速な工業化と海洋インフラへの大規模な投資が、堅牢な検査、保守、マッピングソリューションへの需要を推進しています。新興経済国は、生産の現地化と熱帯およびモンスーンの影響を受ける海域向けの車両設計の適応のために、既存のベンダーとの提携を増やしています。一方、主要なアジア海軍は、艦隊近代化計画に自律型水中ビークルを組み込んでおり、技術移転と共同開発協定を推進しています。
**4. 戦略的コラボレーションと投資:**
主要なプレーヤーは、戦略的イノベーション、提携、ターゲットを絞った投資を通じて、水中ロボットの軌道を形成しています。自律航行のパイオニアは、AI駆動の経路計画と障害物回避能力を洗練させるために学術研究センターと協力しています。同時に、既存の海洋機器メーカーは、製品ポートフォリオを拡大し、市場投入までの時間を短縮するために、専門のロボット企業を買収しています。エネルギー貯蔵と複合材料の専門知識を持つ新規参入企業は、より軽量で長寿命の車両を開発するために合弁事業を形成しており、ソフトウェア企業はミッション計画とミッション後分析を強化するために高度なデータ管理プラットフォームをライセンス供与しています。パイプライン検査や海洋環境モニタリングなどの重要な海底アプリケーションに合わせた特注ソリューションを共同で作成する、技術プロバイダー、システムインテグレーター、エンドユーザーが参加する協調的なエコシステムが出現しています。並行して、防衛請負業者は、海上セキュリティミッション用の次世代遠隔操作型および自律型車両を供給するために、複数年調達契約を確保しています。この統合は、プラットフォームメーカー、サブシステムスペシャリスト、ターンキーミッション実行能力を提供するサービス指向オペレーターとの明確な区別を伴う、ますます洗練されたサプライヤーランドスケープを育成しています。
### 展望
海洋水中ロボット市場の将来は、技術革新、地政学的要因、および戦略的適応によって形成されます。
**1. 2025年関税の影響とサプライチェーンの再構築:**
2025年には、重要なコンポーネントに対する追加の輸出入関税の課税が、特に米国における海洋水中ロボット部門に顕著な影響を与えました。高度なセンサー、高性能バッテリー、特殊複合材料に対する関税は、OEMおよびインテグレーターのコストベースを上昇させました。結果として生じる価格圧力は、サプライチェーンおよび調達戦略全体での戦略的再調整を促しました。製造業者は、原材料およびコンポーネントの代替供給源を模索し、リードタイムと通貨リスクを削減するためにニアショアリングイニシアチブを開始することで対応しました。これらのシフトは物流を合理化しますが、サプライヤー開発と品質管理プロセスへの多大な初期投資も必要とします。その結果、多くの組織は、将来の関税変動から保護するために、垂直統合に焦点を当てて、製造と購入の決定を再評価しています。さらに、関税の累積的な影響は、国内生産代替品の採用を加速させ、地方の製造施設と共同R&Dプログラムへの投資を刺激しました。この傾向は回復力を強化する一方で、技術移転を促進し、グローバルな競合他社との性能パリティを維持するための戦略的パートナーシップの重要性も強調しています。最終的に、2025年の関税状況は、多様な供給基盤、戦略的なオンショアリングの取り組み、コスト最適化への鋭い焦点によって特徴付けられる再構成された市場を触媒しています。
**2. 市場セグメンテーションの深化:**
市場は、車両タイプ(自律型水中ビークル、ハイブリッド型水中ビークル、遠隔操作型水中ビークル、水中グライダー)、深度範囲(深海、浅海、超深海)、コンポーネント(通信、画像処理、ナビゲーション、推進、マニピュレーター)、推進タイプ(浮力駆動、プロペラ駆動、ポンプジェット)、アプリケーション(防衛・セキュリティ、環境モニタリング、検査・保守、研究・探査、測量・マッピング)、エンドユーザー(石油・ガス、養殖、環境保護機関、軍事・防衛、学術・商業研究機関)といった明確なセグメントに分類され、それぞれのセグメントで新たなトレンドと正確な収益予測が詳細に分析されています。これにより、戦略的な意思決定を支援するための深い洞察が提供されます。
**3. 競争力強化と運用効率向上のための戦略的提言:**
業界リーダーは、新たなセンサー、電力ソリューション、AI駆動の制御アルゴリズムの迅速な統合を可能にするモジュール式オープンアーキテクチャシステムへの投資を優先すべきです。柔軟なプラットフォームを採用することで、組織は陳腐化のリスクを軽減し、進化するミッション要件に迅速に対応でき、最終的に投資収益率と運用準備態勢を向上させることができます。さらに、最近の関税変動によって露呈したサプライチェーンの脆弱性に対処するためには、地域の製造およびR&D機関とのパートナーシップを強化することが不可欠です。地域サプライヤーとの緊密な協力は、重要なコンポーネントの継続的な可用性を確保し、共同開発イニシアチブを通じてイノベーションを促進します。同時に、複合材料製造やソフトウェアエンジニアリングなどの分野における社内能力を拡大することは、戦略的レジリエンスを構築し、外部への依存を減らすことにつながります。最後に、業界参加者は、エンドユーザーとアプリケーション固有のソリューションを共同開発することで、エコシステムアプローチを育成する必要があります。パイロットプログラム、共同フィールドトライアル、データ共有協定への参加は、製品検証を加速し、ユーザー中心の設計改良を推進します。この協調的な精神は、顧客満足度を高めるだけでなく、技術成熟サイクルを加速させ、競争の激しい海洋水中ロボット市場における持続可能な成長の基盤を築きます。
以下にTOCの日本語訳と詳細な階層構造を示します。
—
**目次**
**I. 序文**
* 市場セグメンテーションとカバレッジ
* 調査対象期間
* 通貨
* 言語
* ステークホルダー
**II. 調査方法**
**III. エグゼクティブサマリー**
**IV. 市場概要**
**V. 市場インサイト**
* 深海探査および介入のためのAI駆動型自律性の統合
* 多機能海洋タスク向けモジュール式ハイブリッドAUV-ROVシステムの開発
* 水中効率を高めるバイオインスパイアード推進システムの進歩
* 高解像度海底マッピングのための高度ソナーとセンサーフュージョンの採用
* 大規模海洋監視のための協調型水中ロボット群の展開
* 長期ミッション向けリチウム硫黄電池などの持続可能な電力ソリューションの実装
**VI. 2025年の米国関税の累積的影響**
**VII. 2025年の人工知能の累積的影響**
**VIII. 海洋水中ロボット市場、車両タイプ別**
* 自律型無人潜水機 (Autonomous Underwater Vehicle)
* 検査用AUV (Inspection AUV)
* 調査用AUV (Survey AUV)
* 汎用AUV (Utility AUV)
* ハイブリッド水中ビークル (Hybrid Underwater Vehicle)
* 遠隔操作無人潜水機 (Remotely Operated Vehicle)
* 電動ROV (Electric ROV)
* 油圧ROV (Hydraulic ROV)
* 観測用ROV (Observation ROV)
* 作業クラスROV (Work Class ROV)
* 水中グライダー (Underwater Glider)
**IX. 海洋水中ロボット市場、深度範囲別**
* 深海 (Deep Water)
* 浅海 (Shallow Water)
* 超深海 (Ultra Deep Water)
**X. 海洋水中ロボット市場、コンポーネント別**
* 通信システム (Communication System)
* 画像システム (Imaging System)
* マニピュレーターアーム (Manipulator Arm)
* ナビゲーションシステム (Navigation System)
* 音響測位 (Acoustic Positioning)
* GPS水上測位 (GPS Surface Positioning)
* 慣性航法 (Inertial Navigation)
* 推進システム (Propulsion System)
* センサーペイロード (Sensor Payload)
**XI. 海洋水中ロボット市場、推進タイプ別**
* 浮力駆動 (Buoyancy Driven)
* プロペラ駆動 (Propeller Drive)
* ポンプジェット (Pump Jet)
**XII. 海洋水中ロボット市場、用途別**
* 防衛およびセキュリティ (Defense And Security)
* 環境モニタリング (Environmental Monitoring)
* 検査およびメンテナンス (Inspection And Maintenance)
* インフラ検査 (Infrastructure Inspection)
* パイプライン検査 (Pipeline Inspection)
* 研究および探査 (Research And Exploration)
* 測量およびマッピング (Survey And Mapping)
**XIII. 海洋水中ロボット市場、エンドユーザー別**
* 水産養殖 (Aquaculture)
* 環境機関 (Environmental Agencies)
* 軍事および防衛 (Military And Defense)
* 石油・ガス (Oil & Gas)
* オフショア生産 (Offshore Production)
* パイプラインメンテナンス (Pipeline Maintenance)
* 科学研究 (Scientific Research)
**XIV. 海洋水中ロボット市場、地域別**
* アメリカ (Americas)
* 北米 (North America)
* ラテンアメリカ (Latin America)
* ヨーロッパ、中東、アフリカ (Europe, Middle East & Africa)
* ヨーロッパ (Europe)
* 中東 (Middle East)
* アフリカ (Africa)
* アジア太平洋 (Asia-Pacific)
**XV. 海洋水中ロボット市場、グループ別**
* ASEAN
* GCC
* 欧州連合 (European Union)
* BRICS
* G7
* NATO
**XVI. 海洋水中ロボット市場、国別**
* 米国 (United States)
* カナダ (Canada)
* メキシコ (Mexico)
* ブラジル (Brazil)
* 英国 (United Kingdom)
* ドイツ (Germany)
* フランス (France)
* ロシア (Russia)
* イタリア (Italy)
* スペイン (Spain)
* 中国 (China)
* インド (India)
* 日本 (Japan)
* オーストラリア (Australia)
* 韓国 (South Korea)
**XVII. 競争環境**
* 市場シェア分析、2024年 (Market Share Analysis, 2024)
* FPNVポジショニングマトリックス、2024年 (FPNV Positioning Matrix, 2024)
* 競合分析 (Competitive Analysis)
* Deep Ocean Engineering, Inc.
* Deep Trekker
* ECA Group S.A.
* Eddyfi Technologies
* Forum Energy Technologies, Inc.
* Fugro N.V.
* General Dynamics Mission Systems, Inc.
* Hydromea
* International Submarine Engineering Limited
* Kongsberg Gruppen ASA
* Lockheed Martin Corporation
* Northrop Grumman Corporation
* Oceaneering International, Inc.
* QYSEA Technology
* Saab AB
* Soil Machine Dynamics
* Soil Machine Dynamics Ltd.
* TechnipFMC plc
* Teledyne Technologies Incorporated
* TKMS MARIDAN
* VideoRay LLC
**XVIII. 図目次 [合計: 32]**
**XIX. 表目次 [合計: 939]**
………… (以下省略)
*** 本調査レポートに関するお問い合わせ ***
海洋水中ロボットは、人類が直接到達困難な深海や危険な水中環境での観測、調査、作業を可能にする無人機である。地球の約7割を占める広大な海洋の大部分は未解明であり、高水圧、低温、暗闇という極限環境が広がる深海での活動には、人間の限界を超える技術が不可欠だ。ロボット技術の導入は、その優れた耐久性と精密な操作性により、人類の海洋探査能力を飛躍的に向上させ、未知の領域への扉を開く重要な役割を担っている。
海洋水中ロボットは主に二つのタイプに分けられる。一つは、母船からケーブルで電力供給と通信を受け、オペレーターが遠隔操作する有線遠隔操作型ロボット(ROV: Remotely Operated Vehicle)である。ROVは精密作業や長時間の定点観測に適し、海底ケーブルの点検や海洋構造物の保守などに利用される。もう一つは、事前にプログラムされた経路やタスクに基づき自律的に航行する自律型無人潜水機(AUV: Autonomous Underwater Vehicle)である。AUVはケーブルに縛られず広範囲を効率的に調査でき、海底マッピングや海洋データ収集に真価を発揮する。両者はそれぞれの特性に応じ、多様なミッションに投入されている。
これらのロボットの運用を支えるのは、多岐にわたる先進技術である。水中での正確な位置を把握する音響測位システムや慣性航法装置、母船との情報交換を担う音響通信や光通信技術が中核をなす。また、海底の様子を捉える高解像度カメラやソナー、水温・塩分・深度(CTD)センサー、化学物質センサーなど、目的に応じた多様な観測機器が搭載される。動力源には高性能バッテリーや燃料電池が用いられ、長時間のミッションを可能にする。さらに、高水圧に耐え、海水腐食を防ぐ特殊な素材や構造設計も、ロボットの信頼性と耐久性を確保する上で極めて重要である。
海洋水中ロボットの応用分野は非常に幅広い。科学研究では、深海生物の生態調査、海底熱水噴出孔の探査、海洋環境変動のモニタリングなどに貢献する。産業分野では、海底油田・ガス田の探査・開発、パイプラインや通信ケーブルの敷設・点検、洋上風力発電設備などの海洋インフラ保守に不可欠である。また、沈没船や航空機の捜索・救助、機雷探知・除去といった安全保障上の任務、海洋汚染監視や水中文化遺産調査など、その活躍の場は多岐にわたる。これらの活動を通じて、人類は海洋に関する新たな知見を獲得し、持続可能な海洋利用の基盤を築いている。
しかし、海洋水中ロボット技術には依然として多くの課題が残る。特に、限られたエネルギー源での長期間運用、水中における高速・大容量データ通信の確立、複雑な環境下での自律的な判断能力の向上は、今後の研究開発の重要テーマだ。AI(人工知能)や機械学習技術の進化は、AUVの自律性を飛躍的に高め、未知の状況への適応能力を向上させる可能性を秘めている。将来的には、より小型で高性能なロボット群が協調して広範囲を探索したり、長期間海底に常駐してリアルタイムでデータを収集したりするシステムの実現が期待される。海洋水中ロボットは、人類が海洋の奥深くに秘められた謎を解き明かし、その恩恵を享受するための、まさに未来を拓く鍵となるだろう。